I. Introduction
Recently, microwave Doppler radar has been utilized to detect movements of the human body, such as respiration and heartbeat. The detection of movements is used for various applications such as life detection in earthquake events [1] and localization monitoring of enemies in military applications [2]. The microwave radar sensing system radiates a single tone continuous-wave (CW) signal [3ŌĆō8]; the reflected signal is then demodulated in the receiver. The CW radar can obtain movement information from the phase change of the time-varying chest-wall position. The received signal with the demodulated phase is proportional to the chest-wall position information due to respiration and heartbeat.
While CW radar extracts only vital Doppler parameters, frequency-modulated continuous-wave (FMCW) radar can extract multiple parameters, such as distance or Doppler. In the case of FMCW radar, fast Fourier transform (FFT)-based algorithms are used in conventional FMCW radar systems to acquire multiple parameters. However, the FFT-based parameter estimator has considerably low resolution and accuracy [9]. Since the resolution of FFT is low, super-resolution algorithms such as multiple signal classification (MUSIC) and estimation of signal parameters via rotational invariance techniques (ESPRIT) have been used for vital Doppler estimation. In specific, the MUSIC algorithm utilizes the orthogonality between the signal subspace and the noise subspace. In this way, the algorithm can estimate the super-resolution frequency for the parameters; however, compared to low complexity FFT-based methods, this super-resolution method involves much higher complexity. For this reason, it is difficult to apply the super-resolution method to low-cost and real-time vital FMCW systems, and low-complexity two-dimensional (2D) high-resolution algorithms are subsequently required for compact vital radar.
To date, conventional research has been processed on super-resolution algorithms to reduce complexity. A low-complexity super-resolution algorithm without eigenvalue decomposition (EVD) was proposed [10]. The EVD is an essential function to distinguish signal eigenvectors from noise eigenvectors. In this method, the effect of signal eigenvectors is minimized by performing the inverse function as opposed to the EVD. It has similar resolution performance to super-resolution algorithms such as MUSIC. However, a 2D estimation technique is required to simultaneously estimate the respiration signal and position. It still possesses a high complexity to perform multiple parameter estimation for the purpose of obtaining multiple parameters. Therefore, the low-complexity super-resolution algorithm without EVD [10] is difficult to apply to a real-time system. A low-complexity ESPRIT algorithm using reduced-dimension (RD) transformation in a monostatic MIMO radar [11] was proposed. This research assumed that the transmit/receive module is on a radar. In [11], RD transformation was generated by rearranging the Kronecker product of the transmitted steering vector and the received steering vector. However, the low-complexity ESPRIT algorithm using RD transformation in a monostatic MIMO radar [11] has a limitation wherein it can only be operated in the monostatic MIMO radar. An efficient subspace-based algorithm technique for L-shaped array radar [12] was proposed. The azimuth and elevation direction antenna array structure is the L structure. In [12], a new matrix with information for each parameter was generated by using cross correlation between the received signal in the azimuth direction and the received signal in the elevation direction. The cost function of this matrix with the steering vector of the interested signal obtained a 2D direction-of-arrival (DOA) result using maximum value. However, the efficient subspace-based algorithm technique for L-shaped array radar [12] also has a limitation wherein it can only be operated in the 2D L-shaped antenna array structure. Since conventional research is still high complexity and may have disadvantages of operating solely under specific conditions, these research methods have limitations in their application for vital radars. For low complexity, the proposed algorithm needs a method to reduce the complexity by extracting only the interested signal. This method reduces complexity by using Doppler processing of only the interested signal in the distance 1D estimation result.
This paper proposes a low-complexity FFT-MUSIC vital Doppler estimator based on target detection for contactless vital FMCW radar. The proposed method uses FFT to estimate the distance parameter; chirp data of each range bin, with the exception of clutter with stationary phase information, are subsequently used to detect the phase variation and extract the vital signal. After range peak detection, the 1D-MUSIC algorithm is employed to obtain vital Doppler results using only human FFT results. Thus, when compared with full-search super-resolution algorithms, the proposed algorithm reduces the complexity.
The remainder of this paper is organized as follows. Section II presents the signal model of the distance and the vital Doppler for the vital FMCW radar. Section III presents the proposed low complexity MUSIC vital Doppler estimator based on target detection for contactless vital FMCW radar. The complexity of each algorithm is also analyzed in this section. Section IV details the simulations for the various environments. In Section V, experimental results are provided. Finally, conclusions are given in Section VI.
II. Signal Model
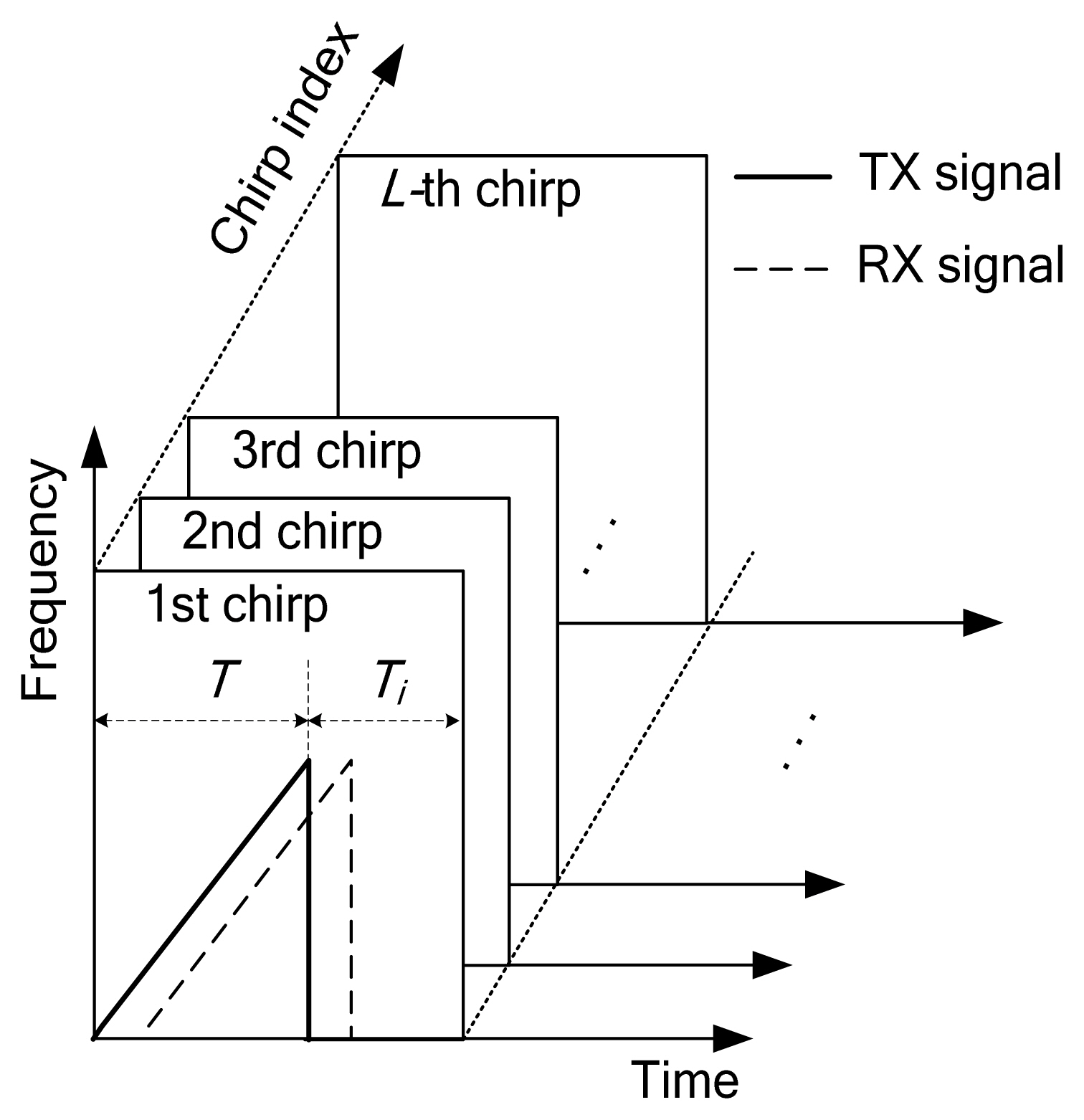
This section addresses the system models of the vital FMCW radar. The vital FMCW radar can estimate parameters such as distance and vital Doppler of humans. Particularly, vital Doppler signals, such as those for respiration and heartbeat, are estimated from the phase information of a reflected signal. An FMCW transmitted (TX) signal is reflected from multiple humans. The reflected signal is changed into a beat signal as a sinusoidal signal at the received (RX) part. The sinusoidal signalŌĆÖs frequency is proportional to the time delay from the human subject. The system model of FMCW radar is considered for multiple humans. The vital FMCW TX signal in Fig. 1 is denoted by stx(t) and it is represented by
where L indicates the number of FMCW chirp signals, and TF denotes the total duration of chirp symbol and idle period, i.e., TF = T+Ti, T is the duration of the chirp symbol, and Ti represents the duration of the idle period.
The vital FMCW chirp symbol s0(t) is composed of
where f0 indicates the initial frequency, ╬╝ is the frequency slope of the FMCW chirp symbol according to time, i.e., ╬╝ = 2ŽĆfBW/T, and fBW represents the bandwidth of the FMCW signal.
For vital Doppler estimation of M targets, the definition of body movement is needed to determine the targetsŌĆÖ fixed distance d0,m and the time-varying distance xm(t) of the m-th target, such as heartbeat signal and chest displacement by respiration. The time-varying distance between the radar and the human subject is represented by
where xm(t)=xm,r(t)+xm,h(t); xm,r(t) and xm,h(t) represent the m-th humanŌĆÖs body motions by respiration and heartbeat, respectively. The time-varying distance xm(t) is composed of movements of
(4)
where am,r and am,h are the amplitude of the respiration and the heartbeat, respectively, and fm,r and fm,h denote the frequency of respiration and heartbeat, respectively. The RX signal from the m-th human is denoted by y╠āl(t) and obtained with time delay Žäm in (5), at the bottom of this page, where ├Żm is the m-th targetŌĆÖs complex amplitude, xm,r,p(t) are the p-th respiration harmonic components for the m-th human, ╬Ė denotes the residual phase, ╬╗ is the wavelength and Žē(t) is the additive white Gaussian noise (AWGN) signal. In order to reduce the complexity of the FMCW radar, a de-chirping method is utilized. The de-chirping method defines the multiplication technique of the conjugation FMCW TX signals
s tx * ( t )
After an analog-to-digital converter (ADC) with fs = 1/Ts where fs is the sampling frequency and Ts is sampling time interval and Ns is the number of samples, the converted FMCW signal is denoted by yl[n] and it is expressed in (7), at the top of this page, where am = ├Żmexp (ŽēsŽäm ŌłÆ ╬╝Žäm2/2) and p is the index of respiration harmonic, i.e., the case of p = 1 means the main respiration signal and the cases of p = 2, 3,ŌĆ”, P denotes the respiration harmonic components. From (7), the vector form yl[n] is denoted by yl and expressed as:
(7)
The vector form yl is rewritten by the range, the vital Doppler, and the DOA terms, respectively, as follows:
where ╬▒, r, and Žē are vectors composed of amplitude, range, and noise terms, respectively, i.e., ╬▒ = [a0, a1,ŌĆ”, aN ŌłÆ1]T, r = [r(Žä0, r(Žä1 ), ŌĆ”,r(ŽäM )] and Žē = [Žē 0 Žē1,ŌĆ”, ŽēN ŌłÆ1]T where r(Žäm) is the FMCW beat signal as shown in (7) and Vl is the diagonal matrix composed of the Doppler term, as follows:
where diag(┬Ę) denotes a matrix operator and vl(m) is the m-th vector of the velocity term.
III. Proposed Low-Complexity Super-Resolution Detection for Range-Vital Doppler Estimation Radar
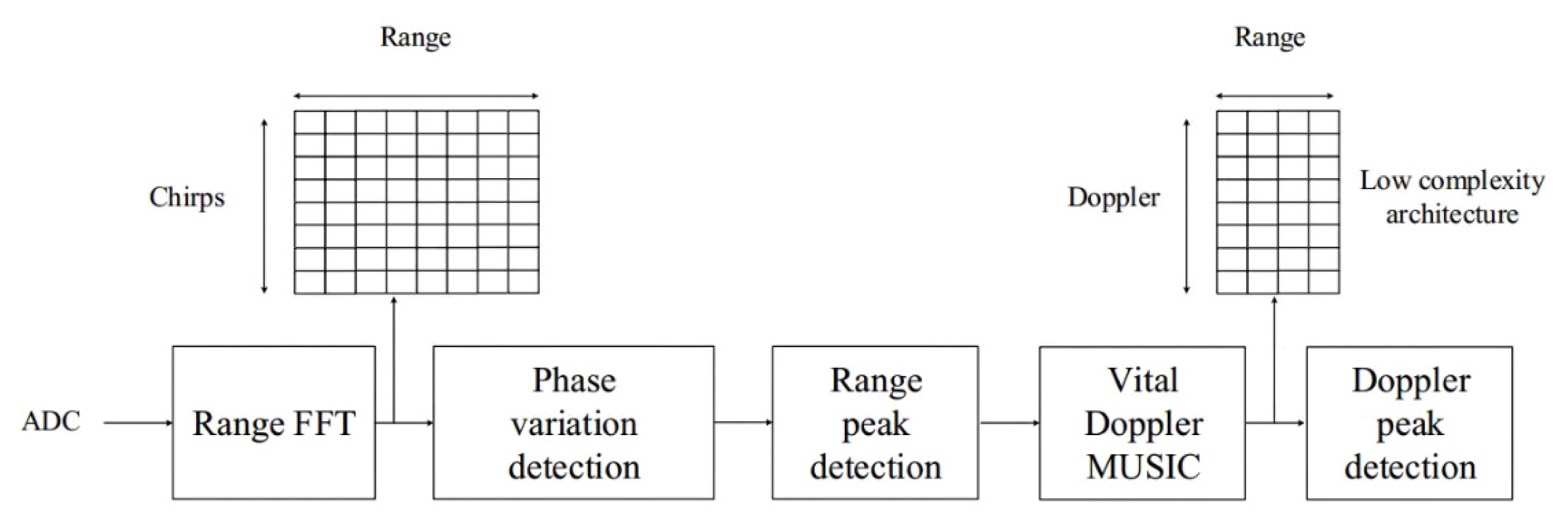
This section proposes a low-complexity FFT-MUSIC algorithm based on target detection for range-vital Doppler estimation. This architecture is aimed at reducing the complexity to use the super resolution algorithm with accurate vital information. While conventional algorithms estimate the vital Doppler information of all targets, the proposed algorithm estimates only the targetŌĆÖs vital Doppler information, as shown in Fig. 2.
1. Distance Parameter Estimation by FFT
First, the proposed algorithm finds the distance parameter of multiple targets from the FFT results of the received beat signal [13]. After the received signal is performed by the 1D-FFT, threshold detection is used to extract the distance index of various targets, and the FFT results corresponding to the distance index are acquired. Using threshold detection, the maximum peak value among the extracted FFT magnitude results is selected. As shown in Fig. 1, for the distance estimation, 1D-FFT [13] is performed on the received chirp signals with the obtained l-th chirp index. The 1D-FFT results Yl = [Yl [0], Yl [1],ŌĆ”, Pl [N-1]]T at the l-th chirp symbol, based on the distance information, are presented as:
where WN is a DFT matrix composed of N column vectors with N by 1 size, i.e., WN=[W0, W1, ŌĆ”, WNŌłÆ1Žē], and the u-th column vector is denoted by Wu and is expressed as
2. Proposed Low Complexity Method for Vital Information
In order to reject clutter information of the received signal, this proposed research uses the 1D-FFT results of multiple chirps of Y1, Y2,ŌĆ”,YL. The phase variation detection using multiple chirp signals of each range sample can be obtained as follows:
Through phase variation detection of 1D-FFT, the range spectrum I = [I1, I2, ŌĆ”, IM] peaks are extracted and the peak index is used to represent the range results of the targets. The phase variation detection results after range 1D-FFT are applied to the super-resolution vital Doppler results.
When only the distance index is obtained by MUSIC [14], high-resolution vital Doppler information is acquired. When the positions of multiple targets are located differently, each target has a different Doppler component. The correlation matrix of the RX signal is set to full rank. However, when the vital components of each target are a coherent signal, the full rank of the matrix is nonexistent. This coherent signalŌĆÖs correlation matrix is a disadvantage. To solve this problem, a smoothing method is utilized to accurately detect vital Doppler. Using the FFT results of the detected i-th target
Y Dopp , i , q = [ Y q + 1 P V ( I i ) , Y q + 2 P V ( I i ) , , ŌĆ” , Y q + Q P V ( I i ) ] T
The forward-backward technique is employed to reject the correlation effect, as in:
where J is the exchange matrix.
The forward-backward autocorrelation matrix
R f b ( i )
(16)
where T can divide the signal eigenvectors Q with P columns corresponding to the P signal eigenvalues and noise eigenvectors N with T-P columns corresponding to the T-P noise eigenvalues. The eigenvalues have a non-increasing order, i.e.,
The MUSIC algorithm is as follows. The vital Doppler vector a(f) is matched with the signal subspace, and the columns of N have orthogonality, such as:
where a(f) is defined as:
Using the principle of (18), in the i-th target among M humans, the 1D-MUSIC spectrum can be determined as:
Thus, the proposed parameter estimator for the vital Doppler for vital FMCW radars has been outlined.
3. Summary of the Proposed Algorithm
The major steps of the proposed algorithm are as follows:
Step 1: Using FFT results of the received beat signal, the proposed algorithm estimates the distance information of multiple targets.
Step 2: Through the phase variation detection of 1D-FFT, the maximum peaks among M targets, with the exception of stationary targets, are achieved.
Step 3: After obtaining the distance index of the human target with vital Doppler, the magnitude and phase information of the distance index are obtained.
Step 4: When only the distance FFT signal corresponding to the distance index is stored, the total data size is reduced.
Step 5: Using the magnitude and phase information of only the distance FFT signal corresponding to the distance index, MUSIC is performed for super-resolution vital Doppler information.
IV. Performance Evaluation By Simulation
In this section, performance of the proposed algorithm, estimated in various simulations, is compared with that of conventional algorithms, such as FFT and MUSIC.
1. Simulation Environment
To assess the performance of the proposed algorithm, two simulations were performed. First, the spectrum results of the proposed algorithm and of full search FFT-MUSIC for vital information are obtained. In the second simulation, the root-mean-square error (RMSE) of the algorithms is determined based on the difference of the distance for the two targets. The SNR is defined by
SNR = 10 ŌĆē log 10 ( Žā s 2 / Žā w 2 ) Žā s 2 Žā w 2 RMSE = 1 N T Ōłæ n = 1 N T ( ╬Ė ^ n - ╬Ė )
2. Simulation Results
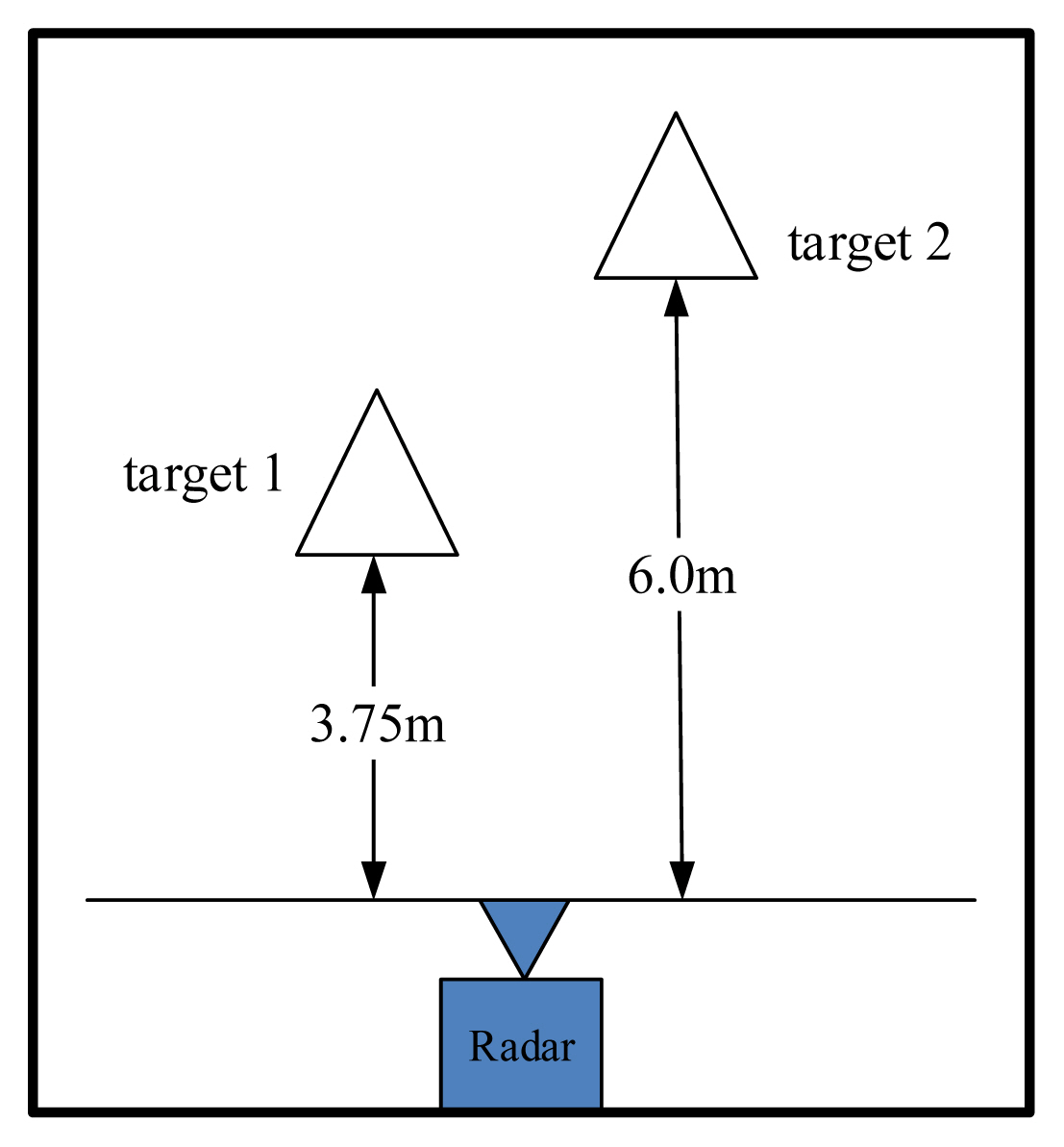
When we consider two humans who are different distances from a radar, they can be extracted in terms of vital information by both the proposed algorithm and the conventional algorithms, while the complexity of the proposed method is lower than that of conventional methods. In Fig. 3, two targets are located at 3.75 m and 6 m. The simulated respiration and heartbeat signals were set to 18 beats/min (0.3 Hz) and 63 beats/min (1.05 Hz), respectively, and the vital information was included with amplitudes satisfying the following: a1,r:a1,h = 10:2. The simulation performance was compared using the spectral results of the full search FFT-MUSIC and proposed algorithms. The SNR was set to 20 dB. Fig. 3 shows the simulation environment of the two targets.
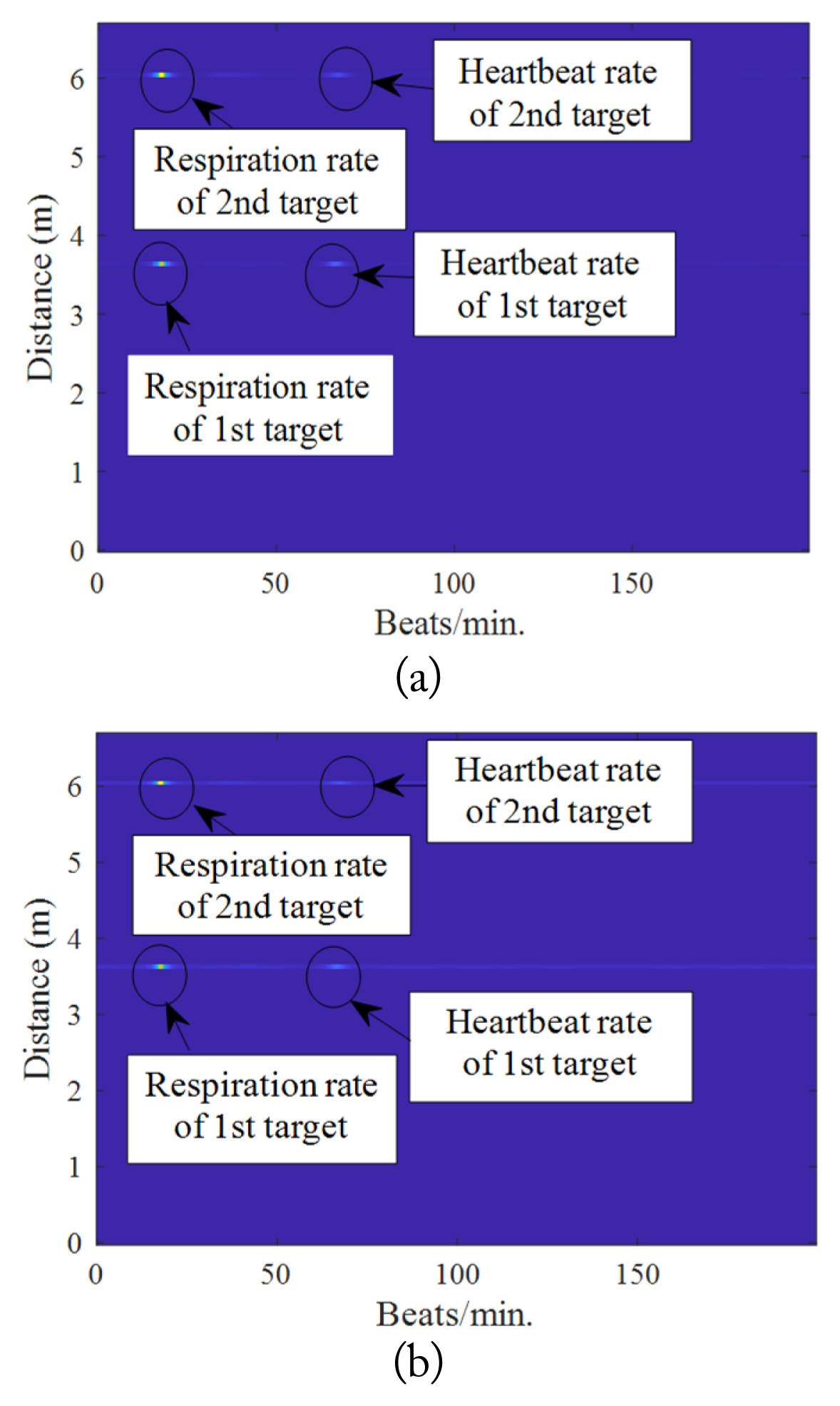
Fig. 4 shows a comparison of each algorithmŌĆÖs distance-vital Doppler spectrum. The conventional full search FFT-MUSIC in Fig. 4(a) and the proposed algorithm in Fig. 4(b) have the same estimation results, while the conventional full search algorithm has higher complexity than those of the proposed algorithms. This is the reason to choose the target signal instead of performing a full search for vital information estimation. Our algorithm has a 193 beats/min maximum heartbeat as the chirp-to-chirp interval (Ti) is 150 ms and chirp duration (T ) is 80 ╬╝s. The interval of chirps is inversely proportional to maximum Doppler range in [13].
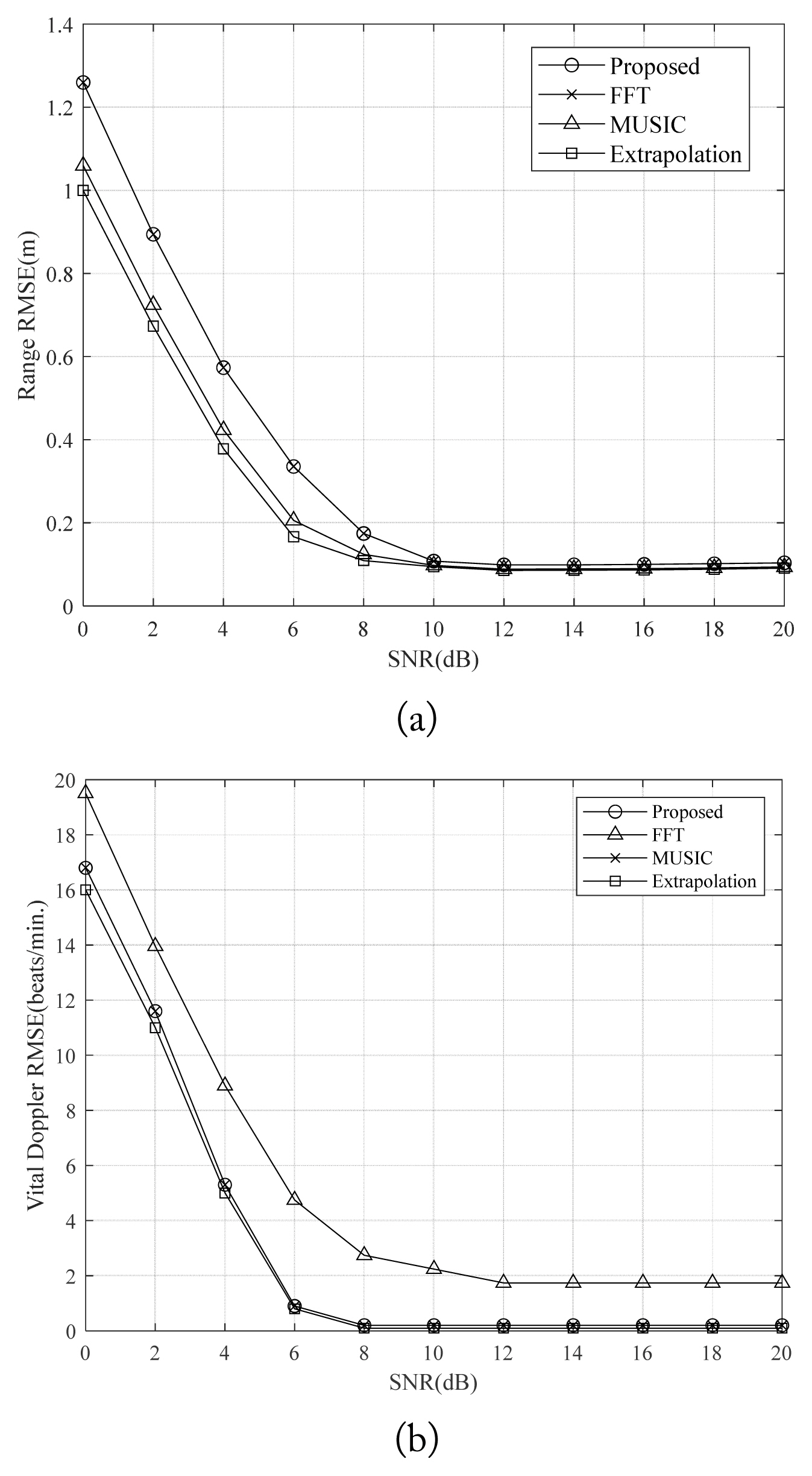
Fig. 5 provides a comparison between the proposed and conventional algorithms for RMSE according to various SNR. In Fig. 5, conventional algorithms include the FFT [13], MUSIC [15], and extrapolation [16]. The estimation performance of the first target in the presence of the second target is focused on. In terms of the distance parameter in Fig. 5(a), when the SNR varies from 0 to 20 dB, the RMSE of the distance estimation of the first target is shown. In Fig. 5(a), with the wide distance difference of 2.25 m, the RMSEs of both the proposed and the conventional schemes, such as FFT, are similar. When the vital information of two persons is similar, as in Fig. 5(b), the proposed structure has results similar to those of the MUSIC algorithm under all SNRs, while the proposed algorithm has lower complexity.
3. Complexity Analysis
In this section, the proposed algorithm and 2D-MUSIC are subjected to complexity analysis. The computational complexity of the algorithms consists of the primary multiplication operation. 2D-MUSIC uses full search to detect human targets for vital Doppler and distances, whereas the proposed algorithm requires a memory-efficient search to estimate multiple parameters. The 2D-MUSIC algorithmŌĆÖs complexity is composed of an autocorrelation matrix, EVD, and spectrum generation by the orthogonality, as shown in (21). In (22), L times N-point FFT for distance estimation and N times L-point FFT for vital Doppler estimation is represented. (23) shows that 2D-extrapolationŌĆÖs complexity is analyzed using prediction order (p) and the number of samples being extrapolated (O). In the case of the proposed algorithm, L times N-point FFT for distance estimation and M times 1D-MUSIC, which only has the targetŌĆÖs data for vital Doppler estimation, are performed as shown in ( 24 ). Here, R denotes the number of spectrum samples of the MUSIC algorithm. When the complexity of the proposed structure in (24) is compared with that of 2D-MUSIC, 2D-FFT, and 2D-extrapolation in (21)ŌĆō(23), the proposed structure in (24) has a complexity of N3 while 2D-FFT serves as a complexity of NL, 2D-extrapolation as a complexity of NLp, and 2D-MUSIC as a complexity of N3L3. The complexities of the 2D-FFT, 2D-extrapolation, 2D-MUSIC, and the proposed algorithms are denoted by C2DŌĆōFFT, C2DŌĆōextra., C2DŌĆōMUSIC, and Cproposed. They are calculated in (21)ŌĆō(24).
Fig. 6 provides a comparison of the primary multiplication operations for the proposed algorithm and 2D-MUSIC. When the numbers of received samples N are 16 and 64, respectively, Fig. 6 shows the required number of multiplications according to the various numbers of chirp symbols. In Fig. 6(a), when the number of chirp signals L is 16, the complexity of the proposed algorithm is about 4.6 ├Ś 106 greater than that of 2D-MUSIC. In Fig. 6(b), it can be seen that when the number of chirp signals L is 64, the complexity of the proposed algorithm is about 2.4 ├Ś 107 greater than that of 2D-MUSIC. Therefore, the complexity of the proposed algorithm is greatly reduced compared to that of 2D-MUSIC.
V. Experiments
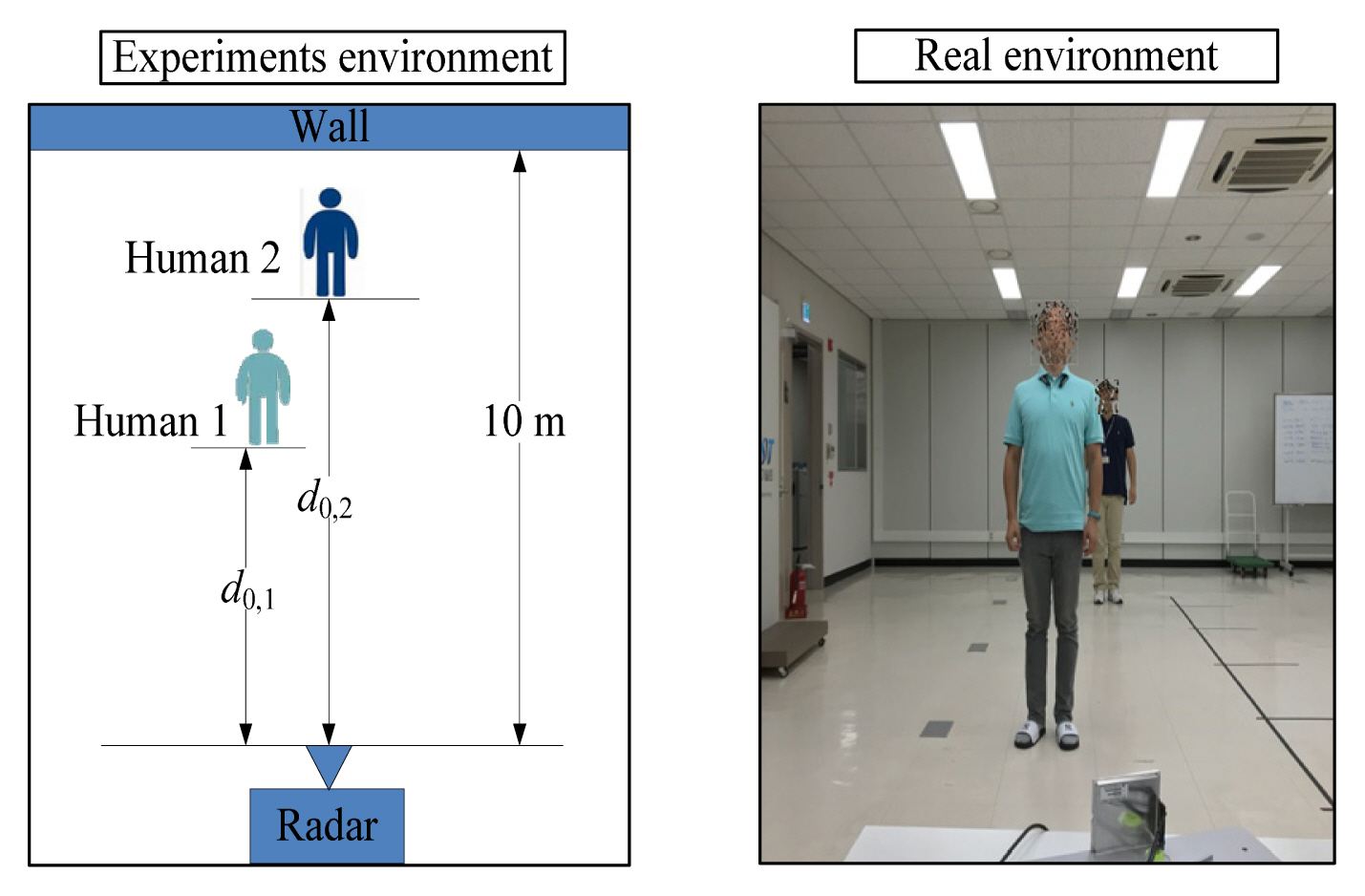
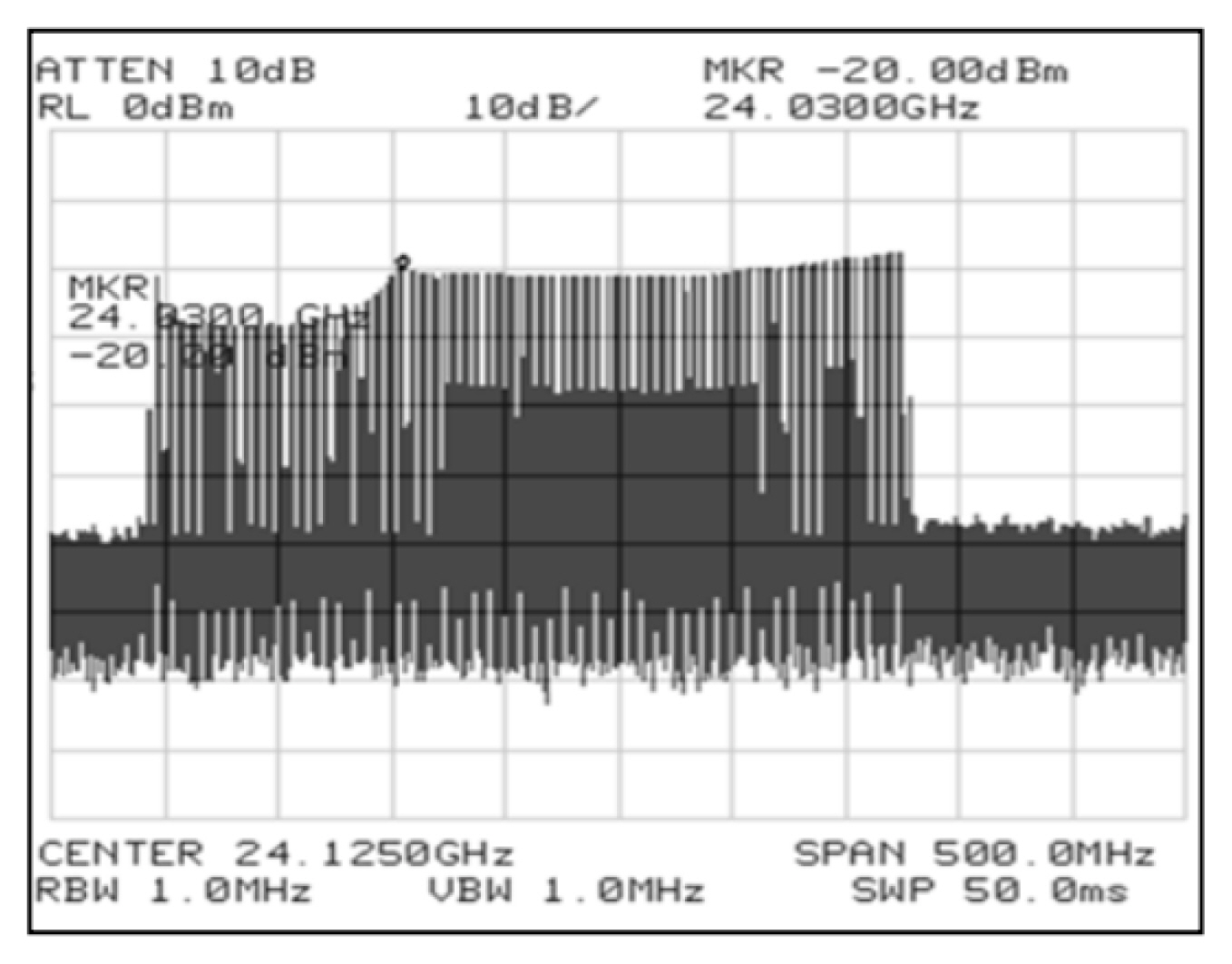
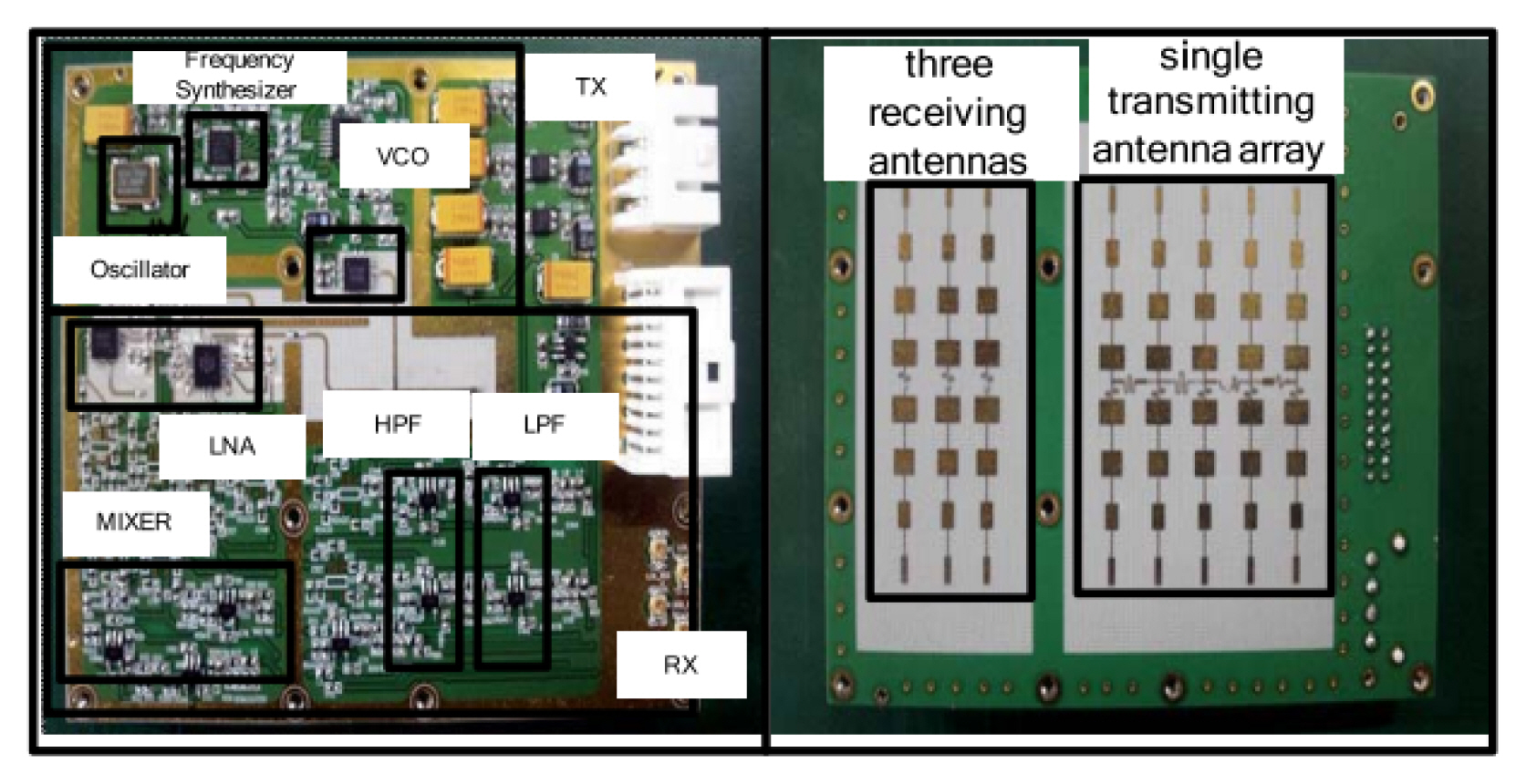
Experiment results were established in an indoor experimental laboratory in South Korea. In Fig. 7, the overall experimental environment is represented. The RF parameters are provided in Table 1. With a 24 GHz center frequency, a FMCW RF module with 1 TX channel and 3 RX channels was involved. The TX consisted of a frequency synthesizer, a voltage-controlled oscillator, and an oscillator with 26 MHz. An FMCW signal was generated for the 200 MHz bandwidth in a range of 24.05ŌĆō24.25 GHz with 8 dBm output power as shown in Fig. 8 [10]. This multi-patch antenna has a gain of 15.6 dBi. An RF signal is moved to the TX antenna and receiver mixer via the power divider. The power divider with an S21 parameter of ŌłÆ6 dB, an S31 parameter of ŌłÆ1.5 dB, and an S11 parameter of ŌłÆ20 dB were used.
The receiver consisted of two high-pass filters (HPFs), two low-pass filters (LPFs), two low-noise amplifiers (LNAs), and two mixers. The receiver had an overall noise figure of 8 dB. The gain and the noise figure of the LNAs were 14 dB and 2.5 dB, respectively. An RF signal was down-converted to an intermediate frequency (IF) signal (beat signal) by the mixer. The measured 3 dB cutoff frequency of the HPFs and the LPFs are approximately 13 kHz and 2 MHz, respectively. The developed 24 GHz FMCW RF module is shown in Fig. 9 [10]. The reference equipment was a watch-type monitoring device, i.e., a Xiaomi Mi Band 2.
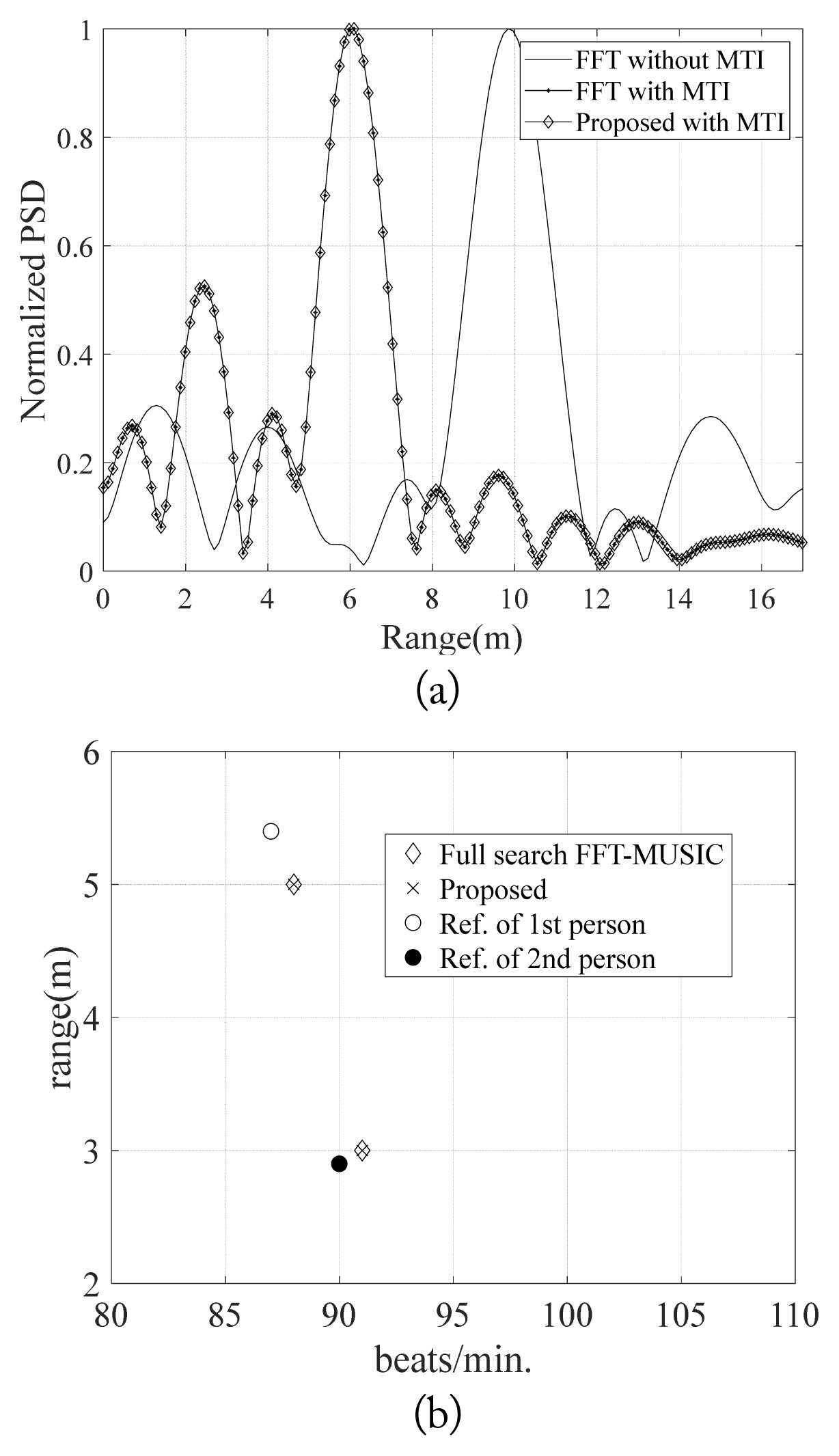
When two targets were together in an indoor room, the experimental estimation results obtained using these algorithms were compared with the corresponding reference signal. In this part, the same parameters are required as in the simulation. In addition, experiments for two cases are performed, as shown in Table 2. Two far-field targets, such as humans, were located at d0,1 = 2.9 m and d0,2 = 4.9 m in Case I and d0,1 = 2.9 m and d0,2 = 5.4 m in Case II.
In terms of Case I, when the two humans were located at a distance difference of 2.5 m, the FFT results with MTI and the proposed results with MTI were able to separate the two humans simultaneously, as shown in Fig. 10. Due to the distance resolution of 2.0 m at this bandwidth, the experimental results with distance difference over 2.5 m show that the conventional algorithms and proposed algorithm can resolve the two targets.
In Case II, the FFT results and the proposed FFT-MUSIC results simultaneously detect two persons, as shown in Fig. 11. Through an experimental comparison of the FFT and proposed algorithms, the conventional and proposed algorithms have similar performance.
VI. Conclusion
This paper proposed the low-complexity FFT-MUSIC algorithm based on target detection for a range-vital Doppler estimator of contactless vital FMCW radar. To improve the accuracy of the parameters for the vital radar, a high resolution-based algorithm was proposed in the form of MUSIC. However, the high resolution-based vital radar is difficult to apply to low-cost and real-time vital FMCW systems. As only target information and vital information through distance FFT by phase variation detection is extracted, the low complexity FFT-MUSIC can be obtained. In cases of complexity, when the number of chirp signals L are 16 and 64, the complexity values of the proposed algorithm are approximately 4.6 ├Ś 106 and 2.4 ├Ś 107 greater than that of the 2D-MUSIC, respectively. Through simulation and experimental comparisons of the full search FFT-MUSIC and proposed algorithms, the conventional and proposed algorithms are found to have similar performance. In the future, these results will be utilized in an embedded system to enhance the parameter accuracy.