I. Introduction
The permanent magnet linear synchronous motor (PMLSM) cancels the intermediate transmission link, which has the advantages of high thrust density, fast speed, high precision, etc. [1–4]. Together with the rapid development of rare earth materials, this further improves performance and minimizes the cost of PMLSMs, making them widely used in industrial automation and in other fields [5, 6]. However, the structural defects of the linear motor itself (discontinuity of the primary core) produce end effects and lead to increased thrust ripple, limiting its development to the field of high precision [7].
The suppression of end effects is divided into the following three main methods. The first is to optimize the length of the primary core and the shape of the ends [8, 9]. This method is effective but has high requirements for the machining accuracy of the motor. The second method suppresses the end force by setting compensation currents at both ends of the primary [10], theoretically suppressing the end effect entirely. Still, the addition of compensation currents increases the complexity of the structure. The last method adopts a modular structure [11], which suppresses the end effect by the phase difference between motors. This method does not require high processing accuracy of the motor and has a promising application.
The current research on modular motors mainly concentrates on the structural design of three-unit modular motors, but few studies have focused on the principle of end-effect suppression and the influence of flux barriers on the motor’s internal magnetic field [12, 13]. Moreover, the electromagnetic field analysis of linear motors mainly adopts the analytical method and the finite element method (FEM). The FEM can accurately solve the magnetic field of complex motor structures with good generality but with expensive computational cost. In sharp contrast, the analytical method is intuitive in physical concepts and fast in computation. As the most common analytical method, the subdomain model has high computational accuracy, but its solution difficulty increases with the complexity of the model [14, 15]. Compared with the subdomain model, the equivalent magnetic circuit method is simple in principle and can take into account the phenomenon of magnetic saturation of the motor, but it can only calculate the magnetic field at a few discrete points; thus, it is difficult to consider the influence of end effects and flux barriers [16, 17].
To this end, this paper proposes an improved modular PMLSM (M-PMLSM) consisting of two-unit motors. For this motor, a subdomain model is proposed that reduces the number of domains and the solving difficulty by converting the Cartesian coordinate system into a polar coordinate system. To exclude the effect of cogging forces, the principle of modular motors suppressing end effects and magnetic field coupling between adjacent motors is explored by analyzing the slotless modular structure, and the minimum magnetic barrier width is derived. Subsequently, the modular structure is applied to a fractional pole-slot ratio motor. The rationality of the proposed modular structure and the validity of the subdomain model are verified by FEM.
II. Modular Motor Principle
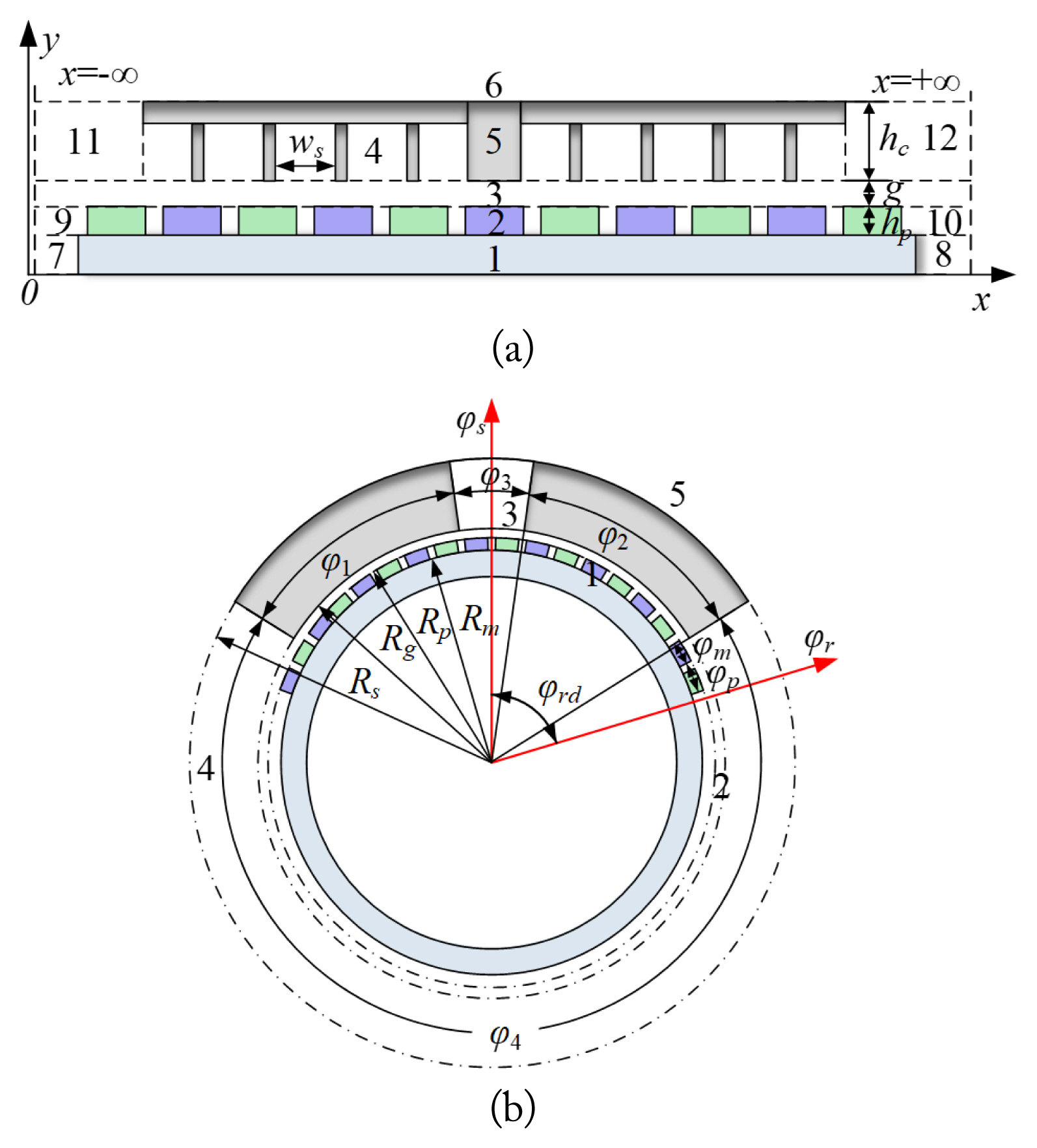
Fig. 1 shows the M-PMLSM proposed in this paper, consisting of two main components: the mover and the stator. The stator consists of permanent magnets (PMs) and a secondary core; the PMs are arranged uniformly on the secondary core according to definite rules. The mover consists of two primary cores, coils, and a flux barrier.
To reduce the detent force and cost, the unit motor in this paper adopts fractional pole-slot ratio concentrated winding [18]. The relationship between the number of motor stator slots Z and the number of pole pairs p satisfies Z = 2p + 1. Therefore, the pole–slot ratio of the unit motor in this paper is 10:9.
For the proposed M-PMLSM, the end forces of the unit motors are obtained as follows:
where Fend1 and Fend2 are the end forces generated by unit 1 and unit 2; n is the order of Fourier expansion, x is the displacement of the mover, Fn is the Fourier decomposition factor, L is the distance between the unit motors, L1 and L3 are the lengths of the primary core and flux barrier, respectively, and τ is the pole pitch.
The whole end force can be depicted as follows:
The distance L between the unit motors satisfies the following equation to minimize the end force:
As the core length L1 of the unit motor is an integer multiple of the pole pitch, the width of the flux barrier can be described as follows:
where a and b are non-negative integers and a > b.
III. Electromagnetic Characteristic Analysis
The electromagnetic field inside the motor can be calculated using FEM and the analytical method. The former is highly versatile but inefficient. The latter is computationally efficient but is challenging to program for complex structures.
For the proposed motor, a slotless modular motor subdomain model is established, which has the following advantages. (1) Excluding the effect of the cogging force, the effect of the flux barrier width on the end force is theoretically clarified. (2) Reducing the number of subdomains and solving difficulty, the effect of the tooth slot can be effectively considered by using coordinate transformation and a two-dimensional air gap relative permeability function.
1. Analytical Model of the Slotless M-PMLSM
The proposed M-PMLSM can be reduced to a two-dimensional problem for analysis, as shown in Fig. 2(a). When considering the end effects generated by the primary and secondary, the two-dimensional quasi-static subdomain model can be divided into 12 domains—secondary core domain 1; permanent magnet domain 2; air gap domain 3; slot domain 4; flux barrier domain 5; external air domain 6; secondary end domains 7, 8, 9, and 10; and primary end domains 11 and 12. A large number of domains leads to a complicated calculation. To reduce the complexity of the calculation, the subdomain model is simplified by transforming the coordinate system into a polar coordinate system. The original left-end domains 7, 9, 11, and right-end 8, 10, and 12 are extended to −∞ and +∞, respectively. In addition, we make the following assumptions [19]:
The materials used in the motor are all isotropic.
The permeability of the primary and secondary cores is infinite.
The permeability of PMs is the same as that of air.
Based on the above assumptions, the subdomain model, as indicated in Fig. 2(b), is constructed. In polar coordinates, the magnetic field can be divided into five domains—domain 1, PMs; domain 2, air gap; domain 3, flux barrier; domain 4, end air; and domain 5, external air. The meanings of the parameters in the Fig. 2(b) are as follows: ρs and ρr denote the primary and secondary coordinate systems, respectively; Rg is the outer radius of the air gap; Rm and Rp are the inner and outer radii of the PMs, respectively; Rs is the outer radius of the primary core; and ρm, ρp, ρ3, and ρ4 are the span angles of PMs, pole pitch, domain 3, and domain 4, respectively. To accurately solve the distribution of the internal magnetic field of the motor, the motor parameters need to be converted as follows:
Suppose the translational velocity of the proposed M-PMLSM is vs and the two-dimensional approximate angular velocity is ωr, the relationship between the two satisfies the following equation:
2. Analytical Model of the Slotless M-PMLSM
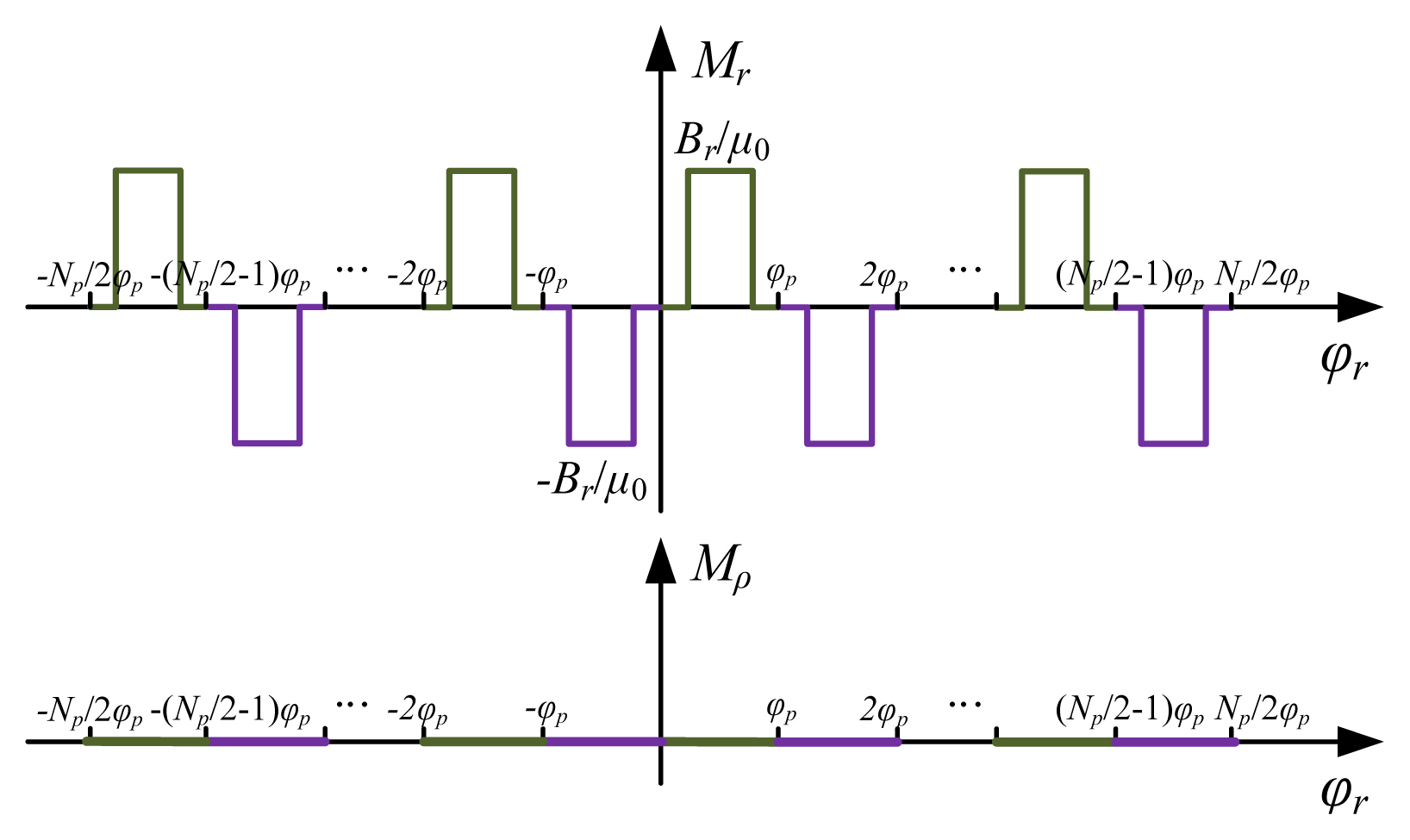
The distribution of the magnetization is presented in Fig. 3. Mr and Mρ are the normal and tangential components of the magnetization M0, respectively, whose expressions can be expanded in the Fourier series as follows:
where Mρcn = Mρsn = 0.
The governing equations of each domain can be expressed by Poisson’s equation and Laplace’s equation, respectively [20, 21].
Then, the magnetic flux density in each domain can be derived by solving for the corresponding magnetic vector potential, which is expressed as [22]
Domain 1
By separating the variables method, the general solution of Poisson’s equation for the PM domain can be solved as follows:
where
(20)
Since the permeability of the secondary core is assumed to be infinite, the boundary conditions satisfy the following:
According to the boundary condition (21), the magnetic vector potential of domain 1 can be simplified as follows:
where
Domain 3
The length of the flux barrier domain is ρ3; thus, its general solution form differs from that of domains 2 and 5. The general solution of the magnetic vector potential in this domain is obtained by the separation of variables method as follows:
where G41k = (r/Rs)kπ/ρ4 and G42k = (r/Rg)−kπ/ρ4.
3. Boundary Conditions
According to the continuity of the normal component of B and the tangential component of H at the junction of adjacent domains, the final boundary conditions are as follows [23]:
4. Slot Effect
Taking a single slot as the analytical model and selecting the center of the slot as the origin ϕ0, the relative permeability function of the two-dimensional air gap of the M-PMLSM is expressed as follows [24, 25]:
where ρw is the span angle of the slot, hm is the height of the PMs, β(r) is a nonlinear function, and Λ is the permeance.
Then, the radial no-load flux density in the slotted air gap domain can be expressed as follows:
IV. Back EMF and End Force
1. Back EMF
The flux linkage ψc produced by a single-turn coil is as follows:
where ρay is the span angle of the coil pitch.
The no-load back EMF induced by the coil is as follows:
where N is the number of turns of the coil, s is the number of coils in the series, and ρi is the starting position of the ith coil.
2. End Force
According to Maxwell’s stress theory, the forces on a rigid body placed in a magnetic field can be calculated using the following equation [26]:
To solve the motor end force, it is necessary to consider only the tangential component of Eq. (45), whose expression can be expressed in the following integral form:
V. Model Verification
To verify the principle of M-PMLSM and the validity of the analytical method, finite element models of two types of modular motors without slots and with 9 slots and 10 poles are established. Their main actual structural parameters and the parameters after coordinate conversion are shown in Tables 1 and 2.
1. End Effect
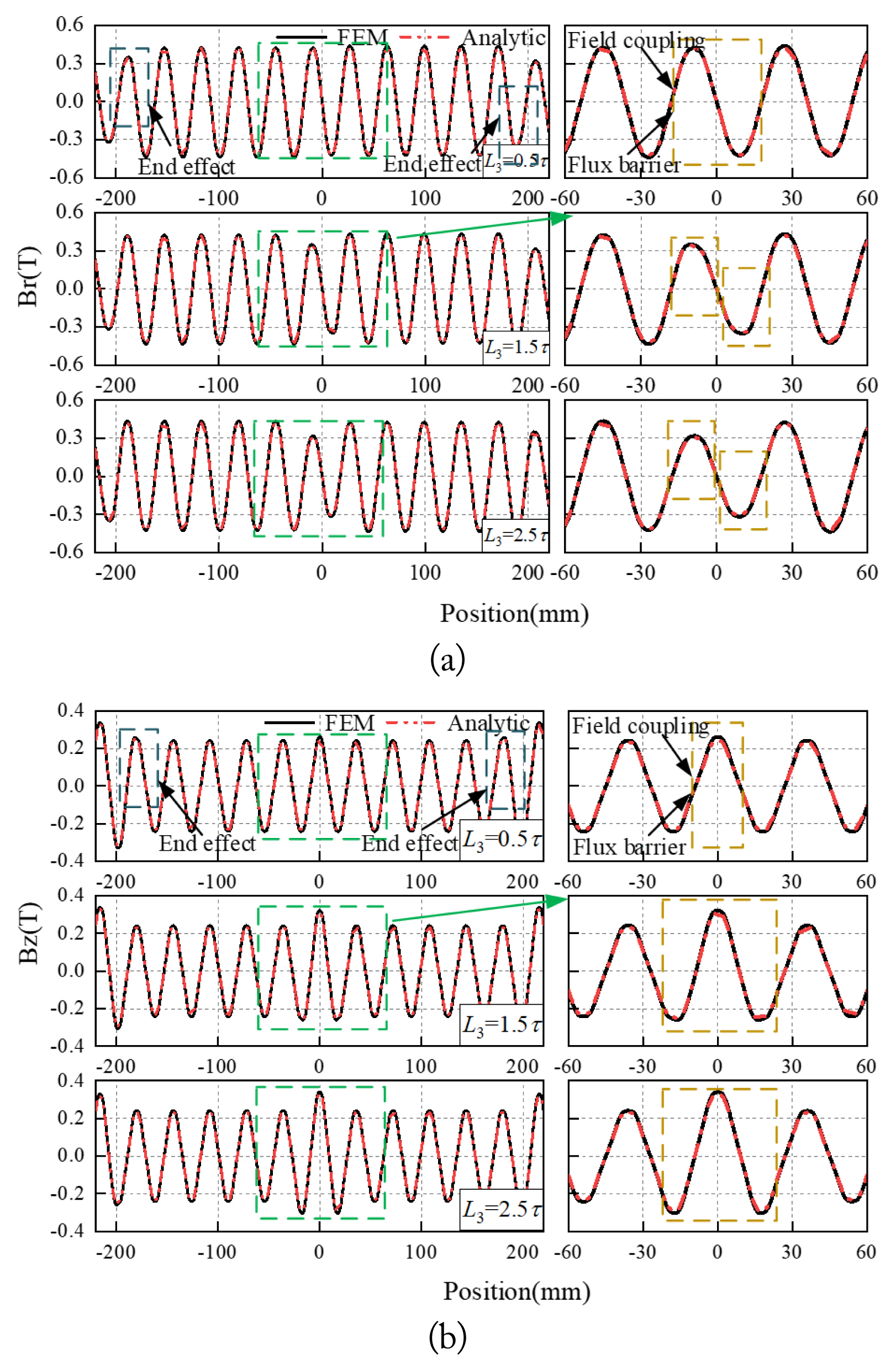
In this paper, the PMs are radially magnetized, and the magnetic field generated by this array has a large number of harmonics. As the distance from the surface of the permanent magnet increases, the magnetic field harmonics are reduced. In addition, the end of the motor is far from the surface of the permanent magnet, as shown in Fig. 1 [20]. To avoid the interference of harmonics and to describe the end effect more accurately, the air gap size of the slotless model is set to 7 mm.
From the analysis in Section II, it is clear that the end force can be effectively reduced when the flux barrier width satisfies Eq. (6). Therefore, three kinds of flux barrier widths are set for analysis according to this formula. Fig. 4 presents the air gap magnetic flux density of the slotless M-PMLSM for three flux barrier widths. The proposed subdomain model can fully consider the effects of flux barriers and ends with a high degree of consistency compared to the FEM. Moreover, the phase of normal magnetic flux intensity between the two-unit motors differs by 180°, while the phase of tangential magnetic flux intensity is the same. It can be seen from Eq. (46) that this makes the phase difference of the end forces between the unit motors by 180°, thereby achieving the effect of reducing the overall end force.
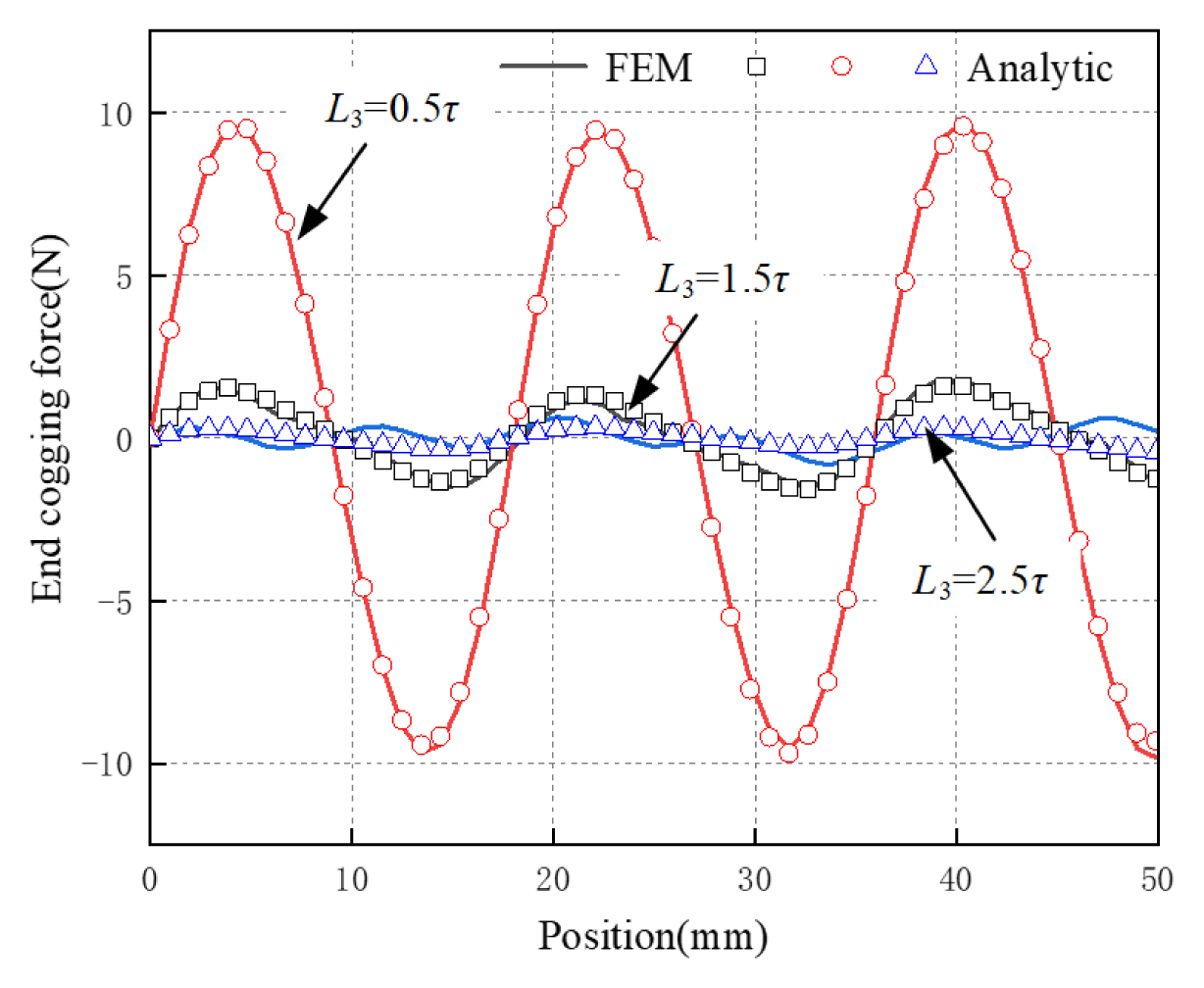
Fig. 5 shows the variation of end force for different flux barrier widths. The end force becomes progressively smaller as the width of the flux barrier increases. This may be because the width of the flux barrier is too small, and the magnetic field between adjacent unit motors is coupled. The magnitudes of the magnetic fields at the corresponding ends of the unit motors are not the same, as shown in the wireframe in Fig. 4. When the width of the flux barrier is 0.5 τ, the amplitude of the magnetic field in the flux barrier region is significantly larger than that of the magnetic field at the ends of both sides. However, the magnetic field amplitudes in the two regions are almost identical for the other two flux barrier widths.
In addition, as the flux barrier width increases, the magnetic field coupling between the unit motors decreases, but it increases the volume of the non-operating area and decreases thrust density. Therefore, the flux barrier width should be set to 1.5 τ.
2. A 9-Pole, 10-Slot M-PMLSM
Through the above analysis, the modular structure is applied to the flat-slotted linear motor structure. To reduce the motor cogging force, a 9-pole, 10-slot structure is adopted.
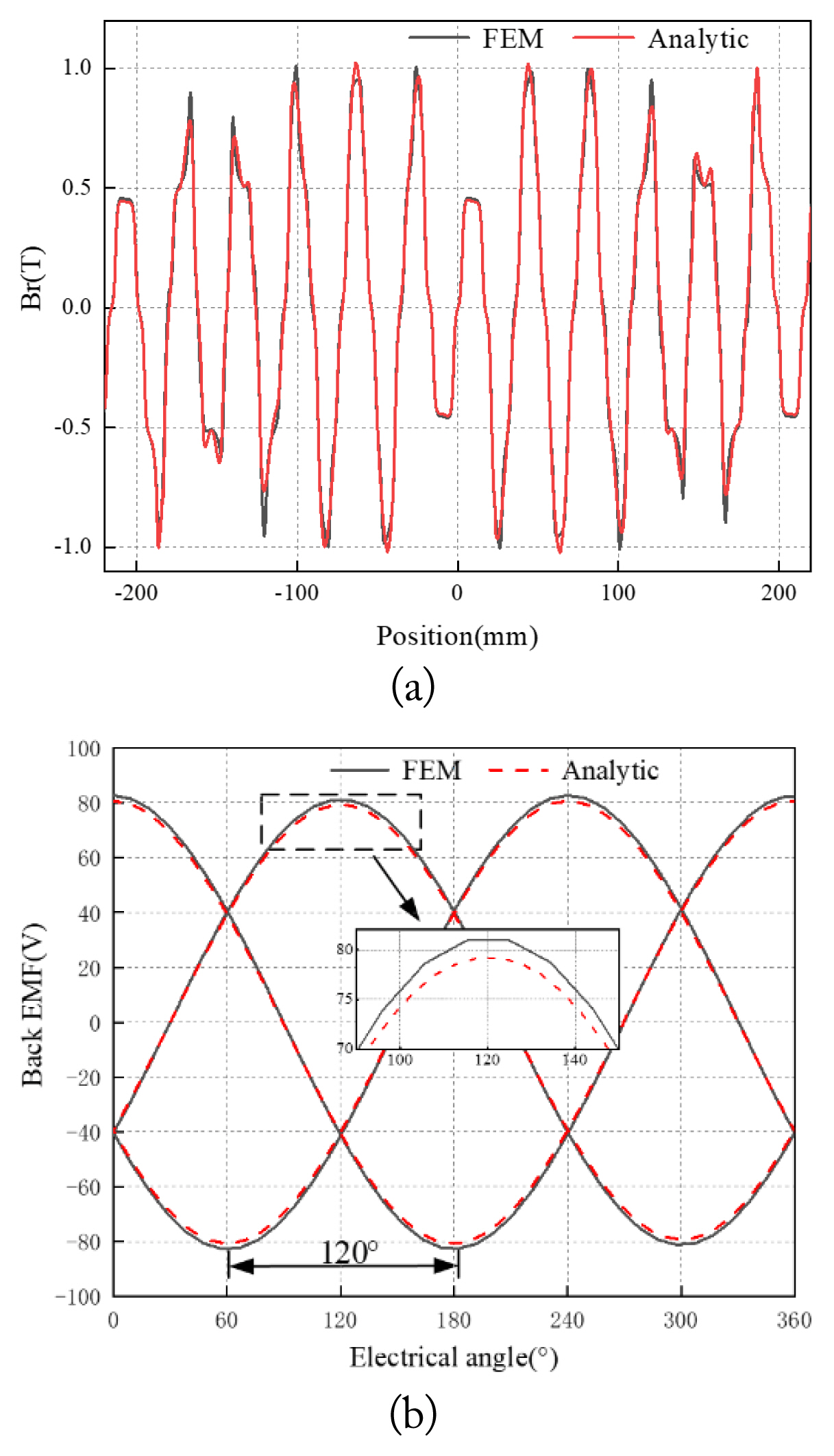
Fig. 6 shows the normal magnetic flux density and back EMF of the proposed M-PMLSM. The analytical method proposed in this paper can solve the effects of ends, flux barriers, and slots very well. Good agreement between the analytical method and FEM is achieved. However, the computational time of the analytical method is only about 10 seconds, and the computational efficiency is greatly improved compared to the FEM.
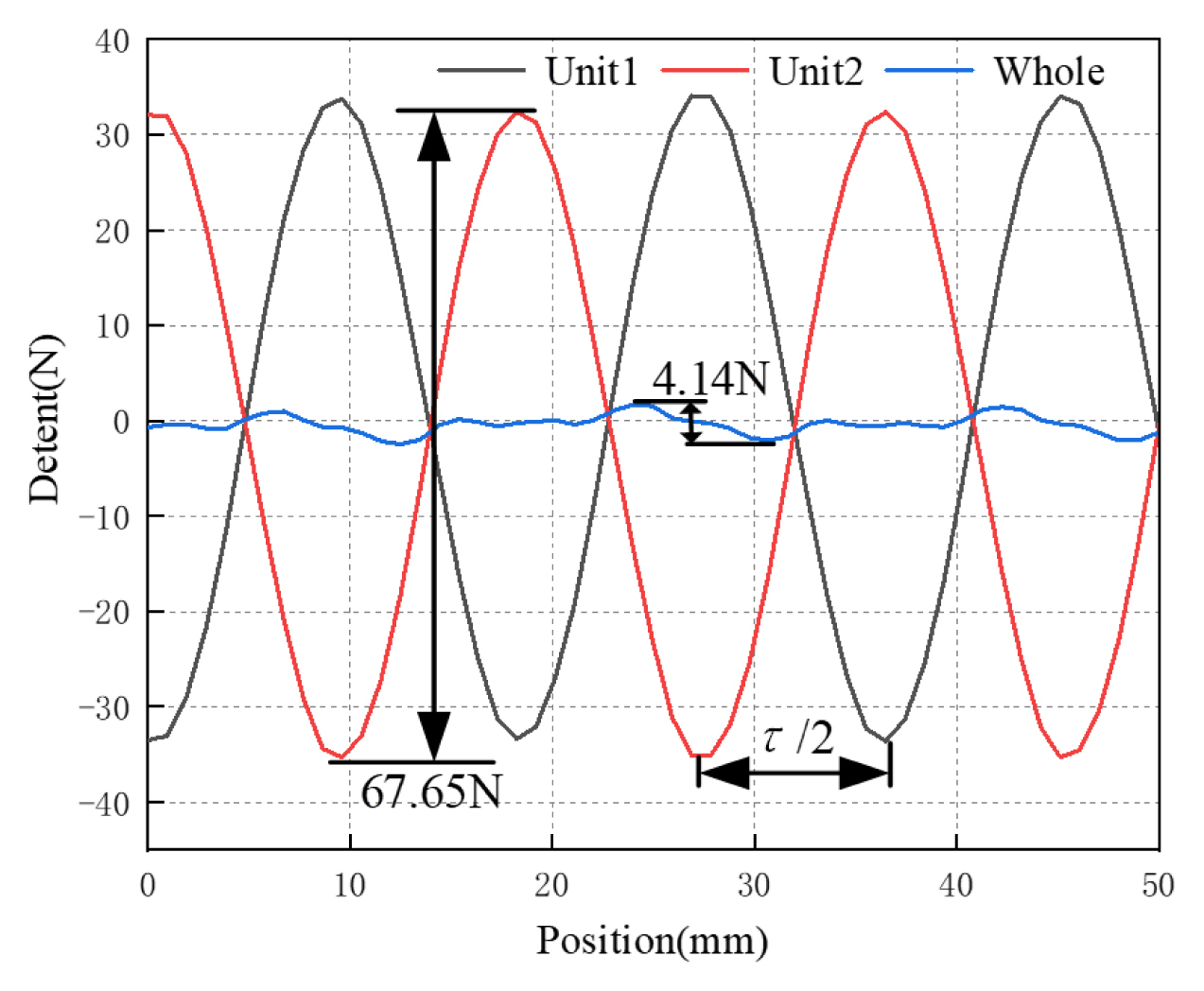
Fig. 7 exhibits the detent force of the M-PMLSM predicted using FEM. It can be seen that the 9-pole, 10-slot structure is used to effectively suppress the slot effect. The detent force of the unit motor is mainly generated by the end effect. Furthermore, through the mutual difference τ/2 phase of the detent force between the motors, the detent force of the entire M-PMLSM is only 4.14 N. Compared with the 67.65 N of the unit motor, the detent force of the modular motor has been greatly reduced. The above phenomenon is also fully consistent with the analysis in Section II.
VI. Conclusion
For the end effect existing in linear motors, this paper proposes an M-PMLSM. Based on the characteristics of the modular structure, an improved subdomain model is constructed, and the principle of end force abatement is explored in essence. The modular structure is then applied to a 9-slot, 10-pole PMLSM, and the corresponding performance simulations are carried out. The following conclusions are obtained. (1) The established subdomain model can fully take into account the effects of ends and a flux barrier in the structure. Compared with the FEM, the proposed method maintains high computational accuracy, and the computational time is significantly reduced, which is more convenient for preliminary structural design. (2) The principle of reducing the end effect of the modular motor is theoretically explored. That is, the normal flux density phases of the unit motors are 180° different from each other, while the tangential flux density phases remain unchanged. Finally, the end forces of the unit motors differ 180° from each other in phase. Moreover, the phenomenon of magnetic field coupling is explained. To avoid this phenomenon, a minimum width of 1.5τ is recommended for the flux barrier. (3) By applying the modular structure to the 9-slot, 10-pole PMLSM, the overall detent force is reduced from 67.65 N to 4.14 N, which effectively reduces the end effect of the motor. Furthermore, the proposed subdomain model is still applicable to the design of slot M-PMLSM.